커뮤니케이션 의도와 주행 시나리오에 따른 자율주행차량 eHMI 디자인 컨셉 제안
Copyright ⓒ 2024 The Digital Contents Society
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.

초록
자율주행 기술의 진보로 인해 차량 내 운전자의 역할이 점차 줄어들면서 기존 차량에서 수행되어 오던 전통적인 차량-보행자 간 정보 전달 체계에 대한 변화 가능성이 제기되고 있다. 현재까지 자율주행차량 시스템과 외부와의 커뮤니케이션을 위해 인간-기계 인터페이스를 통한 다양한 신호를 외부에 전달하는 방법이 제안되고 있지만, 최적의 커뮤니케이션 방식에 대한 합의는 아직 이루어지지 않고 있다. 본 연구는 자율주행차량과 보행자와의 커뮤니케이션을 위한 다양한 인간-기계 인터페이스 설계안을 제시하고, 자율주행차량의 커뮤니케이션 의도와 주행 시나리오에 따라 이를 검증하는 것을 목표로 한다. 연구 결과, 자율주행차량의 주행 시나리오에 따라 인터페이스 유형과 색상이 보행자의 실용성, 직관성, 선호도 측면에서 유의미하게 영향을 미치는 것으로 나타났다.
Abstract
The evolution of autonomous driving technology has resulted in a gradual diminishment of the role of drivers within vehicles, prompting potential alterations to the traditional vehicle-pedestrian communication system employed by conventional vehicles. Various methods employing human-machine interfaces (HMIs) to convey signals to the external environment for communication between autonomous vehicles and the external world have been proposed. However, consensus on the most effective communication method has not yet been reached. This study aims to develop and validate diverse HMI design concepts for autonomous vehicles, with a focus on communication with pedestrians, taking into account the vehicle’s communication intention and various driving scenarios. The research findings indicate that, depending on the autonomous driving scenarios, the design and color of interfaces significantly influence pedestrian perceptions of usefulness, trust, and preference.
Keywords:
Autonomous Driving, Communication Intention, eHMI, Driving Scenario, V2P키워드:
자율주행, 커뮤니케이션 의도, 주행 시나리오Ⅰ. 서 론
자율주행차량 기술에 대한 개발 진척과 그에 대한 관심이 급속도로 증가하면서, 어느덧 주행보조기술의 수준을 넘어선 높은 단계의 자율주행차량들이 여러 기업체와 국가 주도 하에 실제 도로 위에서 테스트를 진행하고 있다. 하지만 고도화된 자율주행 기술 외에도 자율주행차량의 상용화를 위해서는 도로 위 자율주행차량과의 커뮤니케이션 문제를 해결해야 한다.
현재 도로 위 교통 시스템 안에서는 이미 다양한 주체들 간의 많은 커뮤니케이션들이 이루어지고 있다. 차량 사이의 원활한 통행을 위해 이루어지는 운전자들 간의 커뮤니케이션은 물론, 차량과 보행자가 도로에서 마주칠 때 운전자와 보행자 사이에 이루어지는 커뮤니케이션도 존재한다. 특히 보행자는 차량과 마주칠 때 교통상황에 따라 자신의 다음 행동을 결정하기 위해 차량의 움직임 등을 관측하여 암묵적인 신호를 해석해내기도 하고, 운전자의 눈 맞춤이나 수신호, 때때로는 점멸등이나 경적 같은 신호를 운전자로부터 직접 받기도 한다[1]. 하지만, 자율주행차량으로 전환될 경우, 이러한 커뮤니케이션에는 많은 변화가 발생할 것으로 예상되며, 특히 운전자의 부재로 인해 기존에 없던 새로운 문제가 발생하게 된다. 기존의 전통적인 커뮤니케이션에서는 운전자가 직접 다른 운전자나 보행자에게 차량의 의도를 전달하는 직/간접적인 수단이 존재한다. 하지만, 자율주행으로 전환되면서 기존의 운전자가 맡았던 커뮤니케이션 주체로서의 역할을 자율주행차량이 주도적으로 대체할 수 있어야 한다. 이를 위해 자율주행차량의 의도 등의 정보를 외부에 전달하는 방식으로 최근 들어 차량의 외부 인간-기계 인터페이스(external Human-Machine Interface, 이하 eHMI)를 통한 '새로운 커뮤니케이션'을 제안하고 있다[2]. '새로운 커뮤니케이션'이란 기존의 넓은 의미에서 관습적인 도로 위 커뮤니케이션을 넘어, 자율주행차량이 소통의 주체로서 정보를 다른 주체에게 전달하는 것을 말한다. 본 연구는 그 중에서도 기계가 인간 보행자에게 정보를 전달하는 커뮤니케이션에 초점을 맞추었다.
자율주행차량에 요구되는 커뮤니케이션은 기존의 일반 차량의 운전자가 수행하던 전통적인 커뮤니케이션 방식은 물론, 자율주행이라는 새로운 환경에 맞는 그 이상의 상황들도 포괄할 수 있어야 한다. 이를 위해서는 기존의 방향 지시등, 경적, 수신호 등이 수행하던 기능을 포함해 한층 더 높은 차원의 세밀함이 필요하므로, 어떤 구체적인 지시나 신호를 나타내는데 제한이 적도록 주로 시청각을 위주로 하는 다양한 eHMI의 활용이 제안되고 있다[3]. 이러한 eHMI는 정보를 제공하는 형식에 따라 이를 받아들이는 외부의 보행자 또는 다른 차량의 탑승자 등의 이후의 행동에 영향을 주는 것으로 파악되며, 이는 다가올 자율주행 시대를 대비하여 안전하고 혼란을 줄이는 eHMI의 설계안을 제시하는 것이 중요하다.
하지만, 아직까지 자율주행차량에 요구할 수 있는 다양한 커뮤니케이션의 가능성에만 집중하느라, 정작 그 신호를 받아들일 사용자(보행자 또는 외부 차량의 탑승자 등)에 대해 충분히 고려하지 못하고 있다. 이미 여러 창의적인 방식으로 커뮤니케이션 신호를 송신하는 eHMI 설계안이 제안되고 있지만, 아직까지 사용자의 관점에서 다양한 신호를 쉽게 수신하도록 돕고 체계화하는 연구는 미비한 실정이다. 따라서 본 연구는 도로 위에서 일어나는 커뮤니케이션이 필요한 다양한 상황들을 체계적으로 재정의하고, 사용자, 특히 차량을 외부에서 바라보는 보행자의 입장에서 이들 신호를 보다 쉽게 받아들일 수 있는 eHMI의 방식과 유형을 제안하며 그 효과성을 입증해보고자 한다. 이를 위해 본 연구에서는 자율주행차량과 보행자 간의 커뮤니케이션 시나리오를 구체화하고, 이에 대한 eHMI가 보행자에게 전달하고자 하는 메시지와 정보 체계 전달 방식 등을 구체화한 설계안을 도출하고자 한다. 또한, 본 연구에서는 설문조사 방식으로 실제 보행자가 eHMI 설계안의 메시지를 정확하게 받아들이고, 이에 대한 어느 정도 신뢰도를 갖고, 해당 설계안을 선호하는 지 등 다양한 측면에서 분석하고자 한다.
Ⅱ. 선행연구
2-1 커뮤니케이션 유형의 구분
많은 선행연구들이 도로 위에서 벌어지는 커뮤니케이션의 유형을 분류하여 연구하였다. 그 중 공통적으로 가장 많이 언급되고 있는 것으로는 암묵적 커뮤니케이션과 명시적 커뮤니케이션이다[1],[2],[4]. 암묵적 커뮤니케이션의 경우 현재의 보행자들이 차량의 감속이나 가속 행위 등의 차량 움직임을 통해 암묵적인 신호를 해석하고, 이에 따라 차량의 다음 움직임을 예상하여 자신의 다음 행위를 결정하는데 활용하고 있다. 명시적 커뮤니케이션의 경우 운전자와의 수신호를 통해 다양하고 불확실한 교통상황에서 명확하게 의사를 전달하는 신호들을 활용한 커뮤니케이션으로 정의하고 있다. 커뮤니케이션의 유형에 따른 기존 연구들을 살펴보면, Metayer의 연구[1]에서는 eHMI의 유무와 형태가 보행자의 교통 경험에 어떤 영향을 미치는지를 파악하기 위해 보행자가 길을 건너려는 상황에서 마주하는 차량을 일반차량, eHMI가 없는 자율주행차량, eHMI가 있는 자율주행차량으로 구분하여 실험 연구를 진행하였다. 연구 결과, 우선 통행을 양보하기 위해 멈춰선 차량을 앞둔 보행자가 길을 건너는 결정을 내리는데 명시적인 신호인 eHMI가 긍정적인 역할을 한 것으로 나타났다[1]. 그러나 다이오드, LED (Light Emitting Diode), 픽토그램(pictogram) 등으로 구분한 eHMI의 신호 전달 방식에 대해서는 어떤 것이 더 유용한지 밝혀내지 못하고 있다. 이는 제한적 커뮤니케이션 상황에서 각각에 적합한 신호 전달 방식을 설계하지 못하였기 때문으로 유추해볼 수 있다. 한편, 명시적 신호에 대해 방향지시등을 이용한 기존의 전통적 커뮤니케이션과 eHMI를 이용한 새로운 커뮤니케이션 간의 효과를 비교한 실험도 있다[5]. 마찬가지로 보행자가 횡단 의사 결정을 내리는 상황에서 보행자들은 차량의 접근 속도가 현저히 낮아지고, 방향지시등을 이용한 신호가 보일 때 도로 횡단 결정을 가장 빨리할 수 있는 것으로 나타났다. 방향지시등이 eHMI로 대체된 상황에서는 eHMI가 없을 때보다는 빠른 결정을 내리지만, 방향지시등이 사용될 때보다는 느린 것으로 나타났다. 다시 말해, 상호작용 상황에서 암묵적 신호가 적극적으로 활용될 때 소통 효과가 상대적으로 높았고, 명시적 신호가 함께 활용될 때에는 방향지시등을 이용한 전통적 신호 송출을 통할 때 차량 의도를 더욱 빨리 파악한 것을 알 수 있다. 이는 자율주행차량이 신뢰할 수 있는 커뮤니케이션 주체로서 자리잡기 위해서는, eHMI를 활용한 새로운 메시지 전달 체계에 대한 정립을 통해 대중들에게 이해와 익숙함을 얻어야 함을 말한다. 또한, 다른 선행연구에서는 빛 신호에 기반한 eHMI가 여러 주행상황과 조건에서 얼마나 효과적이었는지 확인하고자 eHMI의 커뮤니케이션 목적을 구분하여 설계하였는데, 현재 차량이 자율주행 상태라는 것을 알리는 목적, 차량이 접근하고 있는 상황을 알리는 목적, 보행자가 앞을 지나가도 된다는 것을 알리는 목적 등으로 구분하여 여러 상황에 따라 변화하는 빛 신호가 사용자들로 하여금 더 많은 관심을 끌 수 있는지, 신호가 어떻게 전달되어야 하는지 등 구체적 설계의 필요성을 강조하였다[6].
여러 선행연구들이 커뮤니케이션 유형과 상황에 대한 어느 정도의 구분을 하고 있음을 확인할 수 있었다. 공통적으로 확인할 수 있었던 것은 많은 연구들이 특정 조건에 한정되지 않고 종합적인 상황을 고려한 커뮤니케이션의 조율이 필요하다고 지적했다는 점이다. 하지만, 커뮤니케이션 상황과 eHMI가 어떤 커뮤니케이션 목적을 가지고 있는지 명시한 연구에서는 비교적 구체적으로 사용자들의 경험을 특정할 수 있었다. 따라서, 본 연구는 자율주행차량의 eHMI를 설계할 때 도로 위 여러 종류의 사용자들 중 보행자의 관점으로 한정하여 자율주행차량과 마주하는 특수한 시나리오들을 도출하고 이에 적합한 eHMI 설계안의 효과성 검증을 통해 eHMI가 효과적으로 기능할 수 있도록 도로 위 다양한 커뮤니케이션 상황에 대한 재정의와 체계적인 분류를 선행적으로 수행하고자 한다.
2-2 eHMI 디자인의 유형과 보행자 중심 관점
기존의 전통적인 커뮤니케이션을 대체하기 위한 eHMI의 중요성이 대두되면서 다양한 유형의 eHMI 설계에 대한 연구가 활발하게 진행되고 있다. 선행연구를 종합해보면 eHMI 디자인 유형에 대해 크게 세 가지, 커뮤니케이션 방법과 사용자 관점, 자율주행차량의 상태 표시 메시지에 따른 분류로 구분할 수 있다. 우선 커뮤니케이션 방법에 따른 분류란 자율주행차량이 보행자를 상대로 명시적 커뮤니케이션을 행할 때 해당 소통이 어떠한 방식으로 이루어지는가에 대한 분류다. 문자형 eHMI, 브레이크등(단일 램프), 라이트 애니메이션, 음향 신호 및 음성 언어 안내 등이 여기에 해당한다. 기존 연구에 따르면 문자형 eHMI는 다른 디자인과 달리 별도의 학습이 필요하지 않고, 편안함, 신뢰성, 수용성 측면에서 좋은 커뮤니케이션 방법으로 제시되고 있다[7]. 이에 반해 비(非)문자형 eHMI의 경우 다이오드, LED, 띠, 픽토그램(pictogram) 등으로 구분하고 있고 이러한 단순 형태적 구분은 유의미한 효과 차이를 밝혀내지 못했다[1]. 다만 비(非)문자형 eHMI에 대한 인식은 신호를 받는 보행자가 적응할수록 개선될 것으로 보고 있으나, 대부분 선행연구에서는 단일 보행자와 단일 eHMI 장착 차량 간의 커뮤니케이션 시나리오에서의 실험연구 위주로 수행되어 비(非)문자형 eHMI에 대한 합의는 아직 이루어지지 않고 있다[3].
한편 eHMI의 메시지를 받아들이는 사용자의 관점에 따라 보행자 관점(egocentric: ‘Walk’ 또는 ‘Don’t walk’)과 차량 관점(allocentric: ‘Braking’ 또는 ‘Driving’)의 eHMI로 나누어 볼 수 있다. 기존 연구[8]에 따르면, 사용자 관점의 eHMI 메시지는 보행자의 눈의 움직임을 증가시키지만, 그렇지 않은 다른 eHMI 메시지보다 오히려 응답시간은 빠르다는 결과를 도출하고 있다. 이와 유사하게, 색상 및 애니메이션 패턴에 대한 사용자 선호도 연구에 따르면, 색상과 관점에 따라 사용자가 차량의 의도를 다르게 해석한다는 연구 결과가 있었다[9]. 해당 실험에서 녹색은 양보의 의도를 직관적으로 나타내는 색이었지만 특정 참가자들은 그것이 차량의 이동 의도를 나타낸다고 추론했고, 반대로 빨강색은 브레이크등과 같이 차량의 정지를 나타낸다고 추론하는 등 사용자의 입장에서 혼란의 여지가 존재했다. 이는 관점에 대한 고려가 부족할 시 의도가 명확한 빨강색과 녹색 등이 eHMI에 사용하기에 오히려 혼란을 일으킬 수 있음을 보여주고 있다. 반면 청록색은 양보의 의도를 전달하는 중립적인 색으로 간주되며 특정 의도와 명확한 연관성을 가지지 않아 혼란스러움을 주지만, 보행자의 오해로 이어지지 않는다는 결론을 내리고 있다. 다시 말해, 문자와 색상 등 eHMI 디자인 요소를 적절히 활용하기 위해서는 일관성 있는 사용자 중심의 관점 정리가 필요하다는 것을 유추해볼 수 있다.
자율주행차량의 상태 표시 메시지에 따른 분류란 정적(현재 차량의 자동화 상태만 표시) eHMI와 동적(자율주행차량의 인식과 의도를 전달) eHMI로 요인을 나누는 것을 의미한다. 기존 선행연구[10]에 따르면 정적 eHMI는 보행자의 횡단 결정과 행동에 아무런 영향을 미치지 않지만, 다양한 시나리오(특히 보행자와 차량이 잘 마주치는 거리, 저속 교통상황)에서 모두 동적 eHMI가 보행자의 지각된 안전성을 증가시키는 것을 확인할 수 있다. 이는 다른 선행연구[4]에서도 비양보 상황에서 동적 eHMI에 대한 보행자의 인식 안전성이 정적 eHMI보다 높게 나타난 것을 확인할 수 있다.
요약하자면, 현 시점에서 대다수의 선행연구들은 문자형eHMI의 긍정적 효과는 확인하고 있으나, 차량을 통제하는 기존의 신호등 체계가 차량의 주행 의도를 표현하는 eHMI에 편입되면서 사용자의 관점에 대한 충분한 고려가 이루어지지 않을 경우 사용자에게 혼란을 초래할 가능성을 내비쳤다. 또한, 사용자가 적응할 경우에도 자율주행차량의 의도를 전달하는 동적 eHMI가 정적 eHMI나 eHMI가 존재하지 않는 상황보다 안전한 상호작용을 이끌어낼 수 있다는 점이 eHMI의 미래 표준화 설계에 대한 필요성을 시사한다.
Ⅲ. 자율주행차량의 eHMI 디자인 컨셉 제안
본 연구는 커뮤니케이션 의도(Intent)에 따른 eHMI 설계안을 도출하고 이에 대한 디자인 프로토타입을 제작 및 검증하는 것을 목표로 한다. 이를 위해 먼저 도로 위에서 벌어지는 커뮤니케이션의 의도를 체계적으로 구분하고, 색상, 매체(디스플레이 방식), 디스플레이 구성에 따른 다양한 eHMI 설계안을 구성한 후, 설문조사를 통한 사용자 평가를 진행하고자 한다.
3-1 커뮤니케이션 의도에 따른 eHMI 설계
다양한 도로 위 문제 상황들에 대해 가장 빈번하게 제안하는 설계안은 시각적 정보를 송출하는 방식이다. 이는 과거 현대자동차에서 실시한 소비자 조사 결과에서도 시각적 요소가 가장 중요한 것으로 나타났다[11]. 시각에 대한 의존도가 높은 만큼, 커뮤니케이션을 위한 설계안도 시각을 활용하는 것이 가장 보편적이다. 그러나 자동차가 외부로 다양한 신호를 전달하여 문제를 해결하는 대안으로써 오히려 다른 차량이나 보행자의 관점에서 복잡한 신호로 받아들일 수 있고, 복잡성에 따른 인지적 불안 요인 또는 정확성 등의 문제를 야기할 수도 있어 본래의 목적인 원활한 커뮤니케이션을 달성하지 못할 가능성도 배제할 수 없다. 실제로 인간에게 시각적 인지 요소를 전달하는 고객응대 로봇 등의 자율주행 이동체를 사례별로 분석한 선행연구에 따르면[12], LED 점등, 디스플레이, 프로젝션 등의 인터랙션 구현 방법이 어떠한 규칙이나 이론에 의해 일반화되어 있지 않은 상황에서 보행자 인지에 오히려 혼란을 야기한다는 것을 확인할 수 있다. 이는 커뮤니케이션의 수신자로 하여금 상황을 스스로 판단하는 것보다 오히려 더 많은 정신적 스트레스를 유발하고 주의분산 등 사고를 유발하는 요인이 되기도 한다는 것을 말한다.
따라서 본 연구에서는 이러한 현상을 고려하여 커뮤니케이션 요소들을 체계적으로 정리하고, 상호작용 과정에서 수신자의 역할을 하는 외부 차량의 탑승자 또는 보행자들이 별도의 훈련 없이도 이해하기 쉽도록 자연스러운 행동을 유도할 수 있도록 설계하고자 한다. 이미 이전 연구에서는 도로 위 커뮤니케이션의 의도는 감사, 통행(양보), 주의(경고), 정지, 사과, 인지 등 6개의 분류로 나누고 있고[13], 이를 활용하여 시각적인 인지 효과를 극대화할 목적으로 다양한 커뮤니케이션의 목적(의도)에 따른 분류 체계와 이에 맞는 적절한 색상을 활용한 정보 전달 방식을 제안하기도 하였다[7].
현재 도로 신호체계에서 사용하는 색은 총 3가지로 적색은 정지의 의미하고, 황색은 주의의 의미하고, 녹색은 진행의 의미를 갖는다. 이러한 신호체계의 색은 현재 전세계에서 비엔나 협약에 따라 동일하게 사용되고 있다[14]. 이는 전통적인 사회적 약속으로서 커뮤니케이션 수신자가 직관적으로 신호의 의미를 파악할 수 있도록 도와준다. 다시 말해 다른 새로운 체계를 만들어 설명하는 것보다 빠르고 직관적이라는 뜻으로 해석할 수 있다. 따라서 기존의 도로 신호체계에서 청색 정보를 포함한 커뮤니케이션 형태와 전통적인 신호체계의 색상에 따른 의미를 분류하였다(표 1). 다만 감사(감정)의 의도로 분류한 청색 신호의 경우 현재 국내 도로교통법상 보행자가 차량에게 진행을 자율적으로 양보하는 규정이 없고 차량보다 보행자가 우선된다는 점에서 본 연구에서는 제외하였다.

Traditional color systems for traffic lights
따라서, 본 연구의 가설을 정리하면 다음과 같다.
- H1: 자율주행차량의 커뮤니케이션 의도에 따른 eHMI의 유형별 적정 색상은 달라질 것이다.
- H1-1: 보행자에게 주의 및 인지를 의도한 시나리오에서는 노랑 색상으로 구성한 eHMI에 대한 실용성, 신뢰도, 선호도가 다른 색상에 비해 높을 것이다.
- H1-2: 보행자에게 경고 및 정지를 의도한 시나리오에서는 빨강 색상으로 구성한 eHMI에 대한 실용성, 신뢰도, 선호도가 다른 색상에 비해 높을 것이다.
- H1-3: 보행자에게 통행 및 양보를 의도한 시나리오에서는 초록 색상으로 구성한 eHMI에 대한 실용성, 신뢰도, 선호도가 다른 색상에 비해 높을 것이다.
앞서 제시한 것처럼 커뮤니케이션 의도에 따라 색상을 부여하고 나면, 시각적 신호를 전달하는 매체도 필요할 것이다. 이에 대해 본 연구에서는 차량-보행자간 소통(Vehicle to Pedestrian, 이하 V2P) 기술이 도입된 상황을 전제로 자율주행차량의 전면 디스플레이와 차량 외부의 보행자 간 시각적 신호를 통해 커뮤니케이션하는 상황으로 전제한다. 이는 자율주행차량이 상용화될 때, V2P 커뮤니케이션은 시스템적인 소통에 대한 기술적 합의가 충분히 이루어진 다음으로 생각되지만, 그에 앞서 관습적으로 소통하게 될 주체인 ‘인간 보행자’에 대한 논의는 더욱 필요하기 때문에 V2P 기술과 그러한 기술이 도입된 상황에 초점을 두고 있다. 이 때 디스플레이를 기본적인 수단으로 사용하되 다만 메시지의 긴급성이나 중요성 또는 보행자가 차량의 디스플레이에 시선을 두고 있지 않은 일부 상황 등을 고려하여 바닥으로 프로젝션을 비추는 것이 동시에 활용될 때 커뮤니케이션의 효과를 극대화할 수 있을 것으로 예상한다.
따라서 본 연구에서 제시하는 커뮤니케이션 체계는 다음 표 2와 같이 정리할 수 있다. 커뮤니케이션 체계를 의도, 색 의미, 매체에 따른 통일된 기준으로 분류하고, 각각의 상황에 맞게 기호와 문자를 조합하는 것으로 커뮤니케이션 체계를 정리하였다.
On-road communication system based on intent
정보 전달의 매체와 관련하여 본 연구의 가설을 정리하면 다음과 같다.
- H2: 자율주행차량의 커뮤니케이션 의도에 따라 eHMI의 유형별 정보 전달 매체에 대한 보행자 평가 및 선호도는 달라질 것이다.
- H3: 자율주행차량이 제공하는 eHMI 구성 색상과 정보 전달 매체에 따른 보행자 관점의 실용성, 신뢰도, 선호도는 인터랙션 효과가 존재한다.
마지막으로 세부적인 메시지의 기호/문자도 인지심리학의 관점에서 설계하여 커뮤니케이션 효율을 높일 수 있다. 공간 조형요소별 지각자의 인지 반응에 관한 연구에 따르면 공간 조형요소는 입체, 색상, 형태, 문자 순으로 시지각에 각인된다[15]. 이를 적용해보면 가장 긴급도가 높은 신호에는 디스플레이와 프로젝션을 사용한다는 매체의 구분, 신호의 의도에 따른 색상의 구분, 세부적인 내용은 기호와 문자로 구성한다는 위 커뮤니케이션 체계를 제안한다.
3-2 주행 시나리오 별 eHMI 유형
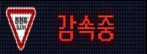
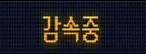
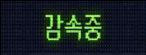
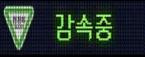
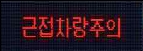
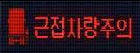
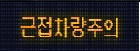
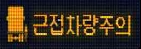
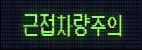
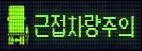
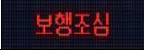
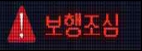
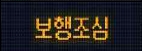
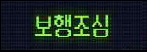
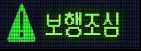
본 연구에서는 도로 위에서 일어나는 대표적인 운전자와 보행자간 커뮤니케이션 상황을 세부 시나리오로 제시하고, 앞 서 제시한 커뮤니케이션 의도와 디자인 체계를 토대로 각 시나리오에 대한 여러 유형의 eHMI 설계안을 제작하였다. 각 시나리오 별로 색상(빨강, 노랑, 초록)과 디스플레이 방식(문자, 문자와 아이콘, 문자와 아이콘, 프로젝션)으로 각각의 조합을 모두 제작하여 구분했다. 본 연구에서 다루는 V2P 상황의 경우 보행자가 차량 외부의 모습을 더 직접적으로 볼 수 있어서 외부 프로젝션을 포함해 디스플레이 방식을 다양화했다. 표 3~표 6과 같이 총 4개의 V2P 커뮤니케이션 시나리오를 구성하였고, 사용자 평가를 위해 본래 의도에 맞는 eHMI 유형을 포함하여 3가지 색상과 3가지 디스플레이 구성에 따른 모든 디자인 유형을 제작하였다(그림 1 참고). 그림 2-4는 디스플레이 구성 예시로, “문자 적용 예시”와 “문자와 아이콘 적용 예시”, “문자와 아이콘, 프로젝션 적용 예시” 등으로 나누어 차량 전면부에 구성하였다.
• V2P Scenario 1: 자율주행 모드로 운행중 보행자의 도보 횡단을 인식하고 자율주행차량이 멈출 예정임을 알리는 eHMI를 통해 전달하는 상황
An example type of eHMI for V2P scenario #1
• V2P Scenario 2: 사각지대에서 접근 중인 자율주행차량 등 보행자가 인식하지 못할 위험요소를 eHMI를 통해 전달하는 상황
An example type of eHMI for V2P scenario #2
• V2P Scenario 3: 도로 상황을 주시하지 않고 바닥을 보고 있는 보행자가 차량을 인지하지 않는 것에 eHMI를 통해 주의를 주는 상황
An example type of eHMI for V2P scenario #3
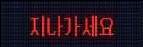
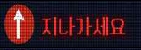
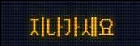
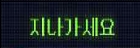
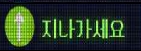
• V2P Scenario 4: 위험상황에서 자유로워 자율주행차량이 보행자에게 통행 가능함을 eHMI를 통해 전달하는 상황
An example type of eHMI for V2P scenario #4

An overview of eHMI types for V2P scenarios

A design concept for “Text only” eHMI*The text in the eHMI has been written in Korean in order to fully deliver the nuance and intent of the information.

A design concept for “Text & Icon” eHMI*The text in the eHMI has been written in Korean in order to fully deliver the nuance and intent of the information.

A design concept for “Text & Icon & Projection” eHMI*The text in the eHMI has been written in Korean in order to fully deliver the nuance and intent of the information.
Ⅳ. eHMI의 효과성 검증
4-1 실험과정
앞서 제시한 커뮤니케이션 의도에 따른 eHMI 디자인을 유형별로 제작하고, 동일한 시나리오에 대해 각각의 eHMI를 제시하며 설문을 통해 사용자 평가를 진행하였다. 본 실험을 위해 총 44명의 대학생들을 연구 참여자로 모집하였고, 참여자의 나이는 평균 22.41세 (SD: 1.54)이고, 남학생 20명과 여학생 24명이 참여하였다. 모든 참여자들은 자율주행차량의 eHMI의 유형과 정보 전달 매체 등을 보고 보행자의 입장에서 동일한 질문들로 구성된 설문을 진행하였고, 동일한 시나리오 내에서 eHMI 유형의 순서는 무작위로 섞이도록 질문을 구성하였다. 총 설문 진행 시간은 약 20분 내외로 소요되었다.
4-2 종속변수
본 연구에서는 총 4가지의 V2P 시나리오에 대해 eHMI 디자인의 사용자 평가를 위해 총 3가지의 종속변수(실용성, 신뢰도, 선호도)를 기준으로 설문지를 구성하였다. 종속변수는 보행자의 관점에서 제시하고 있는 eHMI에 대한 평가를 중점적으로 구성하고자 하였다. 먼저, 보행자가 문자와 아이콘, 프로젝션 등 시각적 정보로 구성된 eHMI를 보고 상황을 충분히 이해하는 지(실용성)과 eHMI 실험 연구에서 빈번하게 활용되고 있는 신뢰도[16]에 대한 변수로 보행자가 eHMI의 정보 습득 후 차량 앞을 건너거나 차량을 신뢰하고 적절한 행동을 취할 수 있는지, 마지막으로 종합적인 eHMI 디자인에 대한 개인의 선호도 등 3가지 종속변수 평가항목을 설정하여 평가하고자 하였다(표 7). 각 평가항목의 질문은 (1) 실용성 (‘상황을 충분히 이해할 수 있도록 유용한 정보를 제공하고 있는가?’), (2) 신뢰도(‘보행자로서 해당 eHMI를 탑재한 자율주행차량 앞을 무리 없이 건널 수 있겠는가?’), (3) 선호도(‘전체적으로 평가한 eHMI 설계안(문자와 색상 등의 조합)이 시나리오와 적합한가?’) 등으로 7점 리커트 척도(Likert Scale)로 구성하였다. 본 설문에서는 디스플레이 방식 3가지 x 색상 3가지 x 시나리오 4개 등 총 36개의 eHMI 유형에 대해 3개의 평가항목(실용성, 신뢰도, 선호도)에 체크하여 총 108개의 설문 문항 평가를 진행하였고, 추가로 주행 시나리오 별로 각 평가항목에 어떤 요소가 가장 큰 영향을 미쳤는지 총 4개의 주관식 답변을 받았다.
Usability questionnaire items for V2P scenarios
4-3 분석 방법
본 연구에서는 커뮤니케이션 의도가 명확하게 구분된 총 4가지의 시나리오 각각에 대해 eHMI의 구성 색상과 디스플레이 정보 전달 매체에 따라 eHMI의 실용성, 신뢰도, 선호도에 차이가 있는 지를 보고자 분산분석 검정을 수행하였다. 수집된 종속변수 데이터의 정규성 확보를 위해 본 실험에서는 총 44명의 피실험자를 대상으로 설문을 진행하였다. 정규성 검정은 Shapiro-Wilk 통계량이 유의한 확률을 보이고 있으나, 전반적인 히스토그램(histogram)과 정규 Q-Q(quantile-quantile) 도표, 왜도(skewness)와 첨도(kurtosis)의 값이 절대값 2보다 작은 것을 근거로 하여 정규성을 만족하는 것으로 파악하였다. 또한, 각 시나리오별로 Levene 통계량이 유의성(p > 0.05) 조건을 만족하여 분산 동질성을 만족하는 것으로 판단하였고, 이에 따라 Tukey HSD 방법으로 사후분석(post-hoc analysis)을 수행하였다.
Ⅴ. 연구 결과 및 토의
앞서 제시한 연구가설을 검증하기 위해 설문 응답을 바탕으로 분석한 결과, 동일한 상황에서 eHMI 메시지의 의도와 색상의 관계성, 디스플레이 방식에 따른 효과의 차이를 유의미하게 확인할 수 있었다.
먼저, V2P 시나리오 1은 자율주행차량이 멈추고 있다는 암묵적 신호를 명시적으로 나타내는 상황으로, “주의 및 인지를 의도한 시나리오에서는 노랑 색상으로 구성한 eHMI에 대한 실용성, 신뢰도, 선호도가 다른 색상에 비해 높을 것이다“ 라는 가설을 세웠다. 분산분석 결과, 실용성, 신뢰도, 선호도 모두 색상과 디스플레이에 유의한 영향을 받는 걸로 파악되었다(표 8). 다중 비교 분석 결과, 색상 면에서 노랑 색상의 선호도가 초록 색상에 비해 유의미하게 높은 것을 확인했고(p < .002), 디스플레이 방식 면에서는 실용성, 신뢰도, 선호도 모두 문자와 아이콘, 프로젝션의 복합 방식이 문자형 방식에 비해 유의미하게 더 높은 평가를 받는 것으로 파악되었다. 이를 통해 주의(인지)의 의도에 노란색이 적합하다는 가설 검증을 확인하였고, 디스플레이 방식의 풍부성이 보행자의 평가에 긍정적이라는 것도 확인했다.
One-way ANOVA results for V2P scenario #1
위의 결과는, 기존의 커뮤니케이션에서 이루어지는 암묵적인 소통을 모두 대체할 것이 아니라, eHMI를 통해 명시적 신호로 새롭게 재해석하여 함께 인식되어야 가장 신뢰할 수 있는 커뮤니케이션이 이루어질 수 있다는 기존 연구결과와 궤를 같이 한다[17]. 다만 V2P 시나리오 1의 경우, eHMI 문자 메시지가 ‘감속 중’ 이라는 보행자 관점이 아닌 차량 관점이 적용되어 있어 보행자 관점에서 커뮤니케이션의 의도와 색상 간의 괴리감으로 인해 혼란이 발생할 가능성이 있을 것으로 추측해볼 수 있다. 이는 V2P 시나리오 2, 3, 4와 비교하여 관점의 차이에 따라 피실험자들의 실용성, 신뢰도, 선호도 측면의 점수에 일정 부분 영향을 줄 수 있을 것으로 판단해볼 수 있다. 따라서, V2P 커뮤니케이션을 위한 eHMI 디자인 설계 시 보행자 관점의 사용자 중심 설계가 고려되어야 할 필요성을 확인할 수 있었다.
V2P 시나리오 2의 경우, 인접한 차량 등 보행자 사각지대의 위험요소를 알리는 상황에서 차량 주변의 사각지대에 제 3의 위험요소가 접근 중임을 보행자에게 알리는 상황이다. 이 경우 시나리오 1과 비교해 구체적인 위험 요소가 존재하므로, 경고와 정지의 의도를 가진 빨강색이 적합할 것이라는 가설을 세웠다. 분산분석 결과, 실용성, 신뢰도, 선호도 모두 색상과 디스플레이에 유의한 영향을 받는 걸로 파악되었다(표 9). 다중 비교 분석 결과, 색상 면에서 빨강 색상의 실용성, 신뢰도, 선호도가 다른 노랑과 초록 색상에 비해 모두 유의미하게 높게 나타났다. 디스플레이 방식 면에서도 실용성, 신뢰도, 선호도 모두 문자와 아이콘, 프로젝션의 복합 방식이 문자형 방식에 비해 유의미하게 더 높은 평가를 받는 것으로 파악되었다.
One-way ANOVA results for V2P scenario #2
시나리오 1과 달리 시나리오 2 상황에서는 빨강 색상과 노랑 색상 간의 종속변수에 미치는 영향이 상대적으로 크게 작용한 것으로 보인다. 이는 구체적인 위험 요소가 메시지의 긴급함과 중요성을 더 부각시켰다는 점과 더불어 차량 상태에 대한 서술이 아닌 명백히 보행자 관점에서 메시지가 서술되어 있는 점에서 메시지를 이해하는데 의도와 색상 간의 매치가 명확했던 것으로 보인다. 이를 통해 경고(정지)의 의도에 빨강 색상이 적합하다는 가설 검증을 할 수 있고, 디스플레이 방식의 풍부성도 유의미한 것을 확인했다.
V2P 시나리오 3의 경우, 바닥을 보고 있는 등 보행자가 차량을 인지하지 않는 것에 주의를 주는 상황으로, 보행자가 주행 환경에 집중하지 않는 등 차량을 인지하지 못할 때 앞에 차량이 있음을 인지시키고자 하는 상황이다. 시나리오 1과 마찬가지로 구체적인 위험 요소는 없지만 주의(인지)의 의도를 가지므로 노랑 색상이 적합할 것이라는 가설을 세웠다. 분산분석 결과, 실용성, 신뢰도, 선호도 모두 색상과 디스플레이에 유의한 영향을 받는 걸로 파악되었다(표 10). 다중 비교 분석 결과, 색상 면에서 빨강 색상과 노랑 색상 모두 초록 색상에 비해 실용성, 신뢰도, 선호도가 유의미하게 높게 나타났다. 디스플레이 방식 면에서는 문자와 아이콘, 프로젝션의 복합 방식과 문자와 아이콘 방식이 문자형 방식에 비해 유의미하게 더 높은 평가를 받는 것으로 파악되었다.
One-way ANOVA results for V2P scenario #3
통계 분석 결과에 따르면, 시나리오 2와 3 모두 초록에 비해 빨강과 노랑 색상이 종속변수에 미치는 영향은 명확하게 보여지고 있다. 하지만, 디스플레이 방식 면에서는 차이를 보였다. 시나리오 3은 프로젝션에 대한 평가가 유독 긍정적으로 나타났다. 그 이유에 대해서 보행자는 일반 차량과의 암묵적 소통 방식에 기인해 차량 전면 유리를 확인하는 반사적인 고정행동 경향을 보이는데[18], 해당 상황에서는 보행자가 차량을 미리 인지하지 못해 시선이 차량을 향하지 않고 있기 때문에 프로젝션이라는 별도의 시각 매체가 상대적으로 더 중요한 역할을 하는 것으로 추측할 수 있다. 결과적으로 넓은 의미에서 경고 및 주의의 의미에 빨강과 노랑이 적합하다는 인식은 확인할 수 있었다.
V2P 시나리오 4의 경우, 보행자에게 통행 가능함을 알리는 상황으로 멈춰선 차량이 보행자에게 통행이 가능하니 지나가도 좋다는 보행자의 직접적인 행동을 명확한 보행자 관점에서 알리는 상황이다. 차량이 완전히 멈춰서 보행자에게 통행 및 양보의 의도를 나타내므로 초록 색상이 가장 적합할 것이라는 가설을 세웠다. 분산분석 결과, 실용성, 직관성, 선호도 모두 색상과 디스플레이에 유의한 영향을 받는 걸로 파악되었다(표 11). 다중 비교 분석 결과, 초록 색상이 빨강과 노랑 색상에 비해 유의미하게 높게 나타났고, 디스플레이 방식 면에서는 실용성, 신뢰도, 선호도 모두 문자와 아이콘, 프로젝션의 복합 방식과 문자와 아이콘 방식이 문자형 방식에 비해 유의미하게 더 높은 평가를 받는 것으로 파악되었다. 이를 통해 통행(양보)의 의도에 초록 색상이 적합하다는 가설을 충족시키고, 디스플레이 방식의 풍부성의 긍정적 효과 또한 확인할 수 있었다.
One-way ANOVA results for V2P scenario #4
Ⅵ. 결 론
본 연구는 자율주행차량이 점차 보편화될 때 기존 커뮤니케이션 환경과 필연적으로 발생할 차이를 고려하고, 자율주행차량만의 커뮤니케이션 방식이 필요하다는 것에 기인해 eHMI를 활용한 커뮤니케이션 체계를 제안하고자 하였다. 이를 위해 커뮤니케이션의 의도를 분류하여 전통적 신호체계에 근거한 적절한 색상을 부여하는 체계를 고안하였고, eHMI의 디자인 요소에 따라 그 효과가 어떻게 달라질지 설문조사를 통해 결과를 분석하였다. 연구 결과, 주의 및 인지를 의도한 시나리오에서는 노랑 색상, 경고 및 정지를 의도한 시나리오에서는 빨강 색상, 통행 및 양보를 의도한 시나리오에서는 초록 색상 등으로 구성한 eHMI에 대한 실용성, 신뢰도, 선호도가 유의미하게 높게 평가되었다. 또한, 커뮤니케이션 의도에 따라 eHMI의 유형별 정보 전달 매체에 대한 사용자 평가 및 선호도는 달라짐을 확인하였고, 하지만, eHMI 구성 색상과 정보 전달 매체에 따른 보행자 관점의 실용성, 신뢰도, 선호도의 인터랙션 효과가 존재하지는 않았다. 따라서, 본 연구를 통해 커뮤니케이션 상황별로 의도에 맞다고 생각되는 적절한 색상이 존재함을 확인하였고, eHMI 디자인 구성요소의 풍부성이 소통 효과에 미치는 영향도 어느 정도 확인할 수 있었다.
본 연구에는 몇 가지 한계점이 존재한다. 먼저 실제로 발생할 수 있는 모든 커뮤니케이션 시나리오에 필요한 eHMI 설계안을 제작하여 실험을 수행하지는 않았다. 모든 커뮤니케이션 상황에 각각 들어맞는 eHMI 디자인을 설계하고 적용하는 것은 현실적으로도 불가능하지만, 본 연구는 의도와 색상에 따른 분류를 고려한 디자인 설계가, 그렇지 않았을 때와 비교하여 효과적인지를 알아보고자 하는 실험 연구에 중점을 두었다. 본 연구에서 검증한 결과를 바탕으로, 후속 연구에서는 다양하고 복잡한 실제 도로 상황에서 차량 상태에 대한 서술을 어떻게 중의적이지 않으면서도 보행자 관점으로 서술할 수 있을지와 여러 eHMI의 메시지가 다른 메시지 해석에 혼동을 일으킬 여지는 없을지에 대한 다각도의 고민이 필요할 것으로 보인다. 또한, 실제 보행자가 직접 횡단하는 상황에서 eHMI에 대한 평가가 아닌 설문조사를 통해 진행하였으므로, eHMI의 시각적 효과는 후속 연구에서 가상현실 기반의 실험을 통한 시선추적 분석 방법 등을 더해 실재적으로 검증해볼 여지가 있다. 마지막으로 본 연구에서는 eHMI 디스플레이의 위치가 고정되어 있었는데, 실제로 보행자 시야에 따라 효과가 제한되는 것을 고려하거나, 더욱 효과적인 디스플레이 위치가 있는지도 후속 연구에서 확인해볼 여지가 있다.
본 연구는 실제 상황에서 아이디어가 어떻게 적용될 수 있을지에 대한 현실적인 실험적 한계가 존재하지만, 커뮤니케이션 의도와 적절한 색상 간의 매치 및 디자인 요소 차이에 따른 효과성에 대한 가설들을 확인해 볼 수 있었다. 이를 통해 앞으로의 자율주행차량 커뮤니케이션에서 논의되어야 할 부분들을 제고하였다는 점에서 의의가 있다. 후속 연구를 통해 현실적 문제를 극복하고 구체적인 적용을 위한 방안을 고민해볼 여지가 많아, 이를 보완할 때 더 많은 연구문제와 의의를 찾을 수 있을 것으로 보인다.
References
-
N. Métayer and S. Coeugnet, “Improving the Experience in the Pedestrian’s Interaction with an Autonomous Vehicle: An Ergonomic Comparison of External HMI,” Applied Ergonomics, Vol. 96, 103478, October 2021.
[https://doi.org/10.1016/j.apergo.2021.103478]

-
K. de Clercq, A. Dietrich, J. P. Núñez Velasco, J. de Winter, and R. Happee, “External Human-Machine Interfaces on Automated Vehicles: Effects on Pedestrian Crossing Decisions,” Human Factors, Vol. 61, No. 8, pp. 1353-1370, December 2019.
[https://doi.org/10.1177/0018720819836343]
-
J. de Winter and D. Dodou, “External Human-Machine Interfaces: Gimmick or Necessity?,” Transportation Research Interdisciplinary Perspectives, Vol 15, 100643, September 2022.
[https://doi.org/10.1016/j.trip.2022.100643]
-
M. Lau, M. Jipp, and M. Oehl, “Toward a Holistic Communication Approach to an Automated Vehicle’s Communication with Pedestrians: Combining Vehicle Kinematics with External Human-Machine Interfaces for Differently Sized Automated Vehicles,” Frontiers in Psychology, Vol. 13, 882394, July 2022.
[https://doi.org/10.3389/fpsyg.2022.882394]
-
Y. M. Lee, R. Madigan, C. Uzondu, J. Garcia, R. Romano, G. Markkula, and N. Merat, “Learning to Interpret Novel eHMI: The Effect of Vehicle Kinematics and eHMI Familiarity on Pedestrian’ Crossing Behavior,” Journal of Safety Research, Vol. 80, pp. 270-280, February 2022.
[https://doi.org/10.1016/j.jsr.2021.12.010]
-
A.-C. Hensch, I. Neumann, M. Beggiato, J. Halama, and J. F. Krems, “Effects of a Light-Based Communication Approach as an External HMI for Automated Vehicles - A Wizard-of-Oz Study,” Transactions on Transport Sciences, Vol. 10, No. 2, pp. 18-32, January 2020.
[https://doi.org/10.5507/tots.2019.012]
-
N. N. Ferenchak, “Longitudinal Bicyclist, Driver, and Pedestrian Perceptions of Autonomous Vehicle Communication Strategies,” Journal of Traffic and Transportation Engineering, Vol. 10, No. 1, pp. 31-44, February 2023.
[https://doi.org/10.1016/j.jtte.2022.07.005]
-
Y. B. Eisma, A. Reiff, L. Kooijman, D. Dodou, and J. C. F. de Winter, “External Human-Machine Interfaces: Effects of Message Perspective,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol. 78. pp. 30-41, April 2021.
[https://doi.org/10.1016/j.trf.2021.01.013]
-
D. Dey, A. Habibovic, B. Pfleging, M. Martens, and J. Terken, “Color and Animation Preferences for a Light Band eHMI in Interactions between Automated Vehicles and Pedestrians,” in Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (CHI ’20), Honolulu: HI, pp. 1-13, April 2020.
[https://doi.org/10.1145/3313831.3376325]
-
M. Wilbrink, M. Lau, J. Illgner, A. Schieben, and M. Oehl, “Impact of External Human-Machine Interface Communication Strategies of Automated Vehicles on Pedestrians’ Crossing Decisions and Behaviors in an Urban Environment,” Sustainability, Vol 13, No. 15, 8396, July 2021.
[https://doi.org/10.3390/su13158396]
- DBR. Automobile Engine Sound Pianist Collaborates with Composers [Internet]. Available: https://dbr.donga.com/article/view/1101/article_no/5834, .
- J. H. Lee and Y. Koo, “A Study on the Visual Perfection Factors of the Autonomous Mobile Platform: The Human View,” in Proceedings of HCI KOREA 2018, Jeongseon, pp. 556-559, January 2018.
-
S. H. Kang, S. H. Lee, J. A. Jang, S. M. Kwon, and Y. H. Ha, “A Study on Survey of Requirements for Design Thinking-Based V2H Communication,” Journal of Korean Society of Transportation, Vol. 40, No. 1, pp. 58-68, February 2022.
[https://doi.org/10.7470/jkst.2022.40.1.058]
- W.-S. Han, H.-W. Lee, C.-S. Hyun, D.-H. Joo, and C.-K. Lee, “A Study on the Signal Control Unit’s Reconstitution to Control the Separated Through/Left(or Right) Turn and the Median Bus Lane Signal for the Standard Traffic Signal Controller,” The Journal of the Korea Institute of Intelligent Transport Systems, Vol. 8, No. 5, pp. 57-70, October 2009.
- T. W. Park, “Study on Percipient’s Cognitive Reaction of Spatial Formative Elements,” Journal of Basic Design & Art, Vol. 17, No. 1, pp. 245-256, February 2016.
-
K. Holländer, P. Wintersberger, and A. Butz, “Overtrust in External Cues of Automated Vehicles: An Experimental Investigation,” in Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’19), Utrecht, Netherlands, pp. 211-221, September 2019.
[https://doi.org/10.1145/3342197.3344528]
-
A.-C. Hensch, I. Kreißig, M. Beggiato, and J. F. Krems, “The Effect of eHMI Malfunctions on Younger and Elderly Pedestrians’ Trust and Acceptance of Automated Vehicle Communication Signals,” Frontiers in Psychology, Vol. 13, 866475, May 2022.
[https://doi.org/10.3389/fpsyg.2022.866475]
-
J. Bindschädel, I. Krems, and A. Kiesel, “Two-Step Communication for the Interaction between Automated Vehicles and Pedestrians,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol. 90, pp. 136-150, October 2022.
[https://doi.org/10.1016/j.trf.2022.08.016]
저자소개

2018년~현 재: 광운대학교 미디어커뮤니케이션학부 학부생
※관심분야:UI/UX, HCI, 디자인방법론, 인터랙티브디자인

2023년:광운대학교 미디어커뮤니케이션학부(학사)
※관심분야:UI/UX, HCI, 유니버셜디자인, 웹디자인

2021년:서울대학교 산업공학과(박사)
2022년~현 재: 계명대학교 산업공학과 조교수
※관심분야:산업안전, 안전공학, 인간공학

2019년:서울대학교 산업공학과(박사)
2021년~현 재: 광운대학교 미디어커뮤니케이션학부 조교수
※관심분야:인간공학, HCI, VR/AR, 3D프린팅, UI/UX